
Realisation



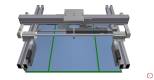




One of the recent projects that we would like to present is the design of a vacuum gripper for moving electronic PCBs. The main objective of this challenge was to develop a new gripper system. In order to meet the requirements and expectations of the customer, it was necessary in this case to take into account several key issues, namely:
- the gripper had to be enclosed in an enclosure so as to protect against particle loss,
- there may be random holes on the edge of the PCB, so the suction cup should close if it is in a hole,
- possibility to adjust the suction power through the microcontroller,
- operation of the gripper should not cause damage to the panel,
- light weight of the gripper,
- automatic gripping range adapted to the size of the PCB, i.e. between 350 mm and 650 mm,
- possibility to dismantle and replace the gripper elements,
- ability to adapt and replace the old gripper in an existing production line,
- ability of partial suction for smaller panels,
- PCB thickness in the range 0.025 ~ 2.5 mm,
- maximum PCB weight – 5 kg.
To meet the guidelines presented above, we used various components in the project, including solutions from FESTO. Moreover, we proposed vacuum suction cups with return valves. The need for this tool arose from the different sizes of plates. In addition, this way we guaranteed effective protection against unsealing of the pneumatic system. The realised project also included electric actuators for stepless adjustment of the suction cup position and two vacuum generators.
If you want to use a similar service, contact us now.